لوکومن: رباتی چابک با دستانی برای انجام کارهای بیشتر
دانشمندان ربات چهارپایی به نام لوکومَن را توسعه دادهاند که میتواند با استفاده از دو پای جلویی خود در حین راه رفتن روی پاهای عقب، اشیاء را برداشته و با آنها کار کند. این ربات با دستپاگردانهای (Loco-manipulators) پیشرفتهی خود، چابکی و کارایی رباتهای چهارپا را به سطحی جدید ارتقا میدهد. به گزارش سرویس رباتیک […]
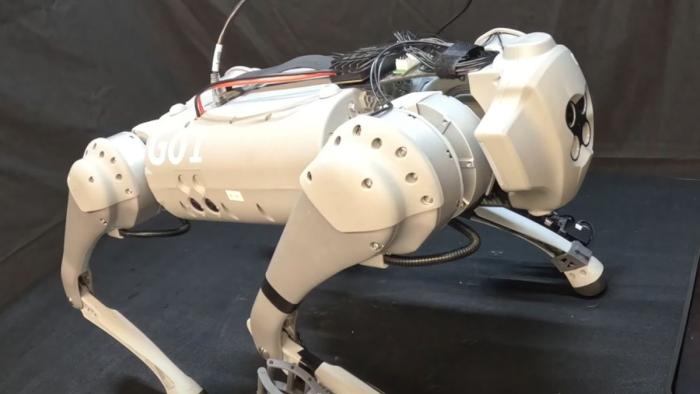
دانشمندان ربات چهارپایی به نام لوکومَن را توسعه دادهاند که میتواند با استفاده از دو پای جلویی خود در حین راه رفتن روی پاهای عقب، اشیاء را برداشته و با آنها کار کند. این ربات با دستپاگردانهای (Loco-manipulators) پیشرفتهی خود، چابکی و کارایی رباتهای چهارپا را به سطحی جدید ارتقا میدهد.
به گزارش سرویس رباتیک و اختراعات رسانه تکنا، برخلاف رباتهای چهارپای معمولی که برای حمل اشیاء به بازوهای اضافی نیاز دارند، لوکومَن میتواند از دو پای جلویی خود برای انجام وظایف مختلف مانند باز کردن در، برداشتن اشیاء و حتی استفاده از ابزار استفاده کند. این قابلیت به دلیل طراحی منحصر به فرد دستپاگردانهای این ربات است که با الهام از آناتومی دست انسان ساخته شدهاند.

دستپاگردانهای لوکومن دارای مفاصل شبیه به مچ، آرنج و شانهی انسان هستند و با استفاده از چهار عملگر فشرده، حرکات دقیق و کنترلشدهای را ارائه میدهند. این دستپاگردانها به گونهای طراحی شدهاند که همزمان با حفظ چابکی ربات، قابلیت حمل و دستکاری اشیاء را نیز فراهم کنند. محققان عملکرد لوکومَن را در آزمایشهایی مختلف از جمله باز کردن درها، فشار دادن دوشاخه به پریز برق و برداشتن اشیاء در فضاهای تنگ ارزیابی کردهاند. نتایج نشان میدهد که این ربات با “چابکی قابل توجهی” تمامی وظایف را به اتمام رسانده است.
به گفتهی دکتر دینگ ژائو، استادیار مهندسی مکانیک در دانشگاه کرنل: “لوکومَن چشمانداز جدیدی از رباتهای هوشمند ارائه میدهد. به جای تکرار انسانها با مورفولوژی مشابه، ما به دنبال رباتهایی مکمل هستیم که بتوانند کارهایی را انجام دهند که انسانها ممکن است نخواهند یا نتوانند انجام دهند.” این ربات نوآورانه میتواند کاربردهای مختلفی در زمینههای مختلف از جمله جستجو و نجات، بازرسی و ساخت و ساز داشته باشد. لوکومن با ترکیب تحرک و دستکاری، گامی مهم در جهت توسعهی رباتهای چابک و کارآمدتر به شمار میرود.
| پیشنهاد ویژه : تعمیر کامپیوتر تهران |
|
پیشنهاد ویژه |









ارسال دیدگاه
مجموع دیدگاهها : 0در انتظار بررسی : 0انتشار یافته : ۰